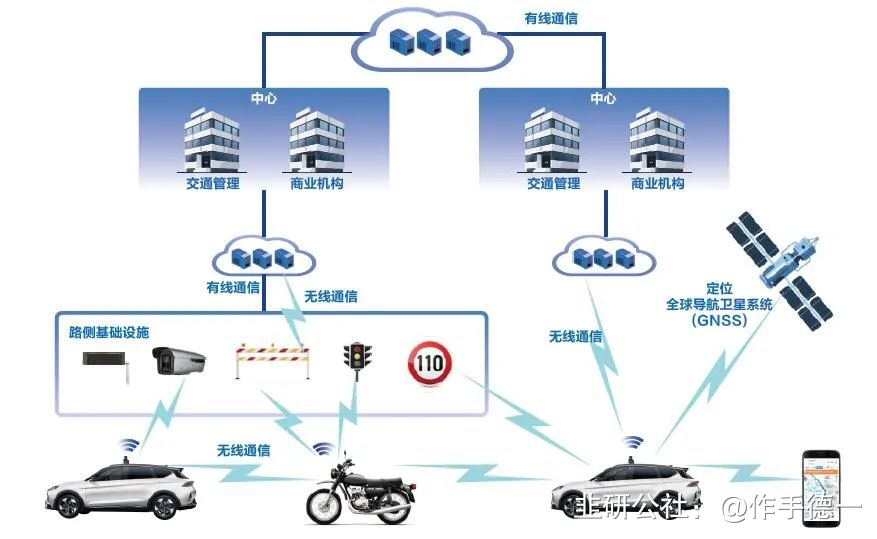
车路协同自动驾驶是在单车智能自动驾驶的基础上,借助C-V2X和4G/5G通信技术,将“人-车-路-云”交通要素有机地联系在一起,实现车与车(V2V)、车与道路(V2I,主要指道路各类系统和设备设施,如感知设施、气象检测器、状态监测设备、交通诱导与控制设施等)、车与云(V2N,地图平台、交管平台、出行服务平台等)和车与人(V2P)等的全方位协同配合(如协同感知、协同决策规划、协同控制等),从而满足不同等级自动驾驶车辆应用需求(如辅助驾驶、高等级自动驾驶),实现自动驾驶单车最优化和交通全局最优化发展目标。图2.1示意说明了自动驾驶车辆与不同交通要素间的协同关系。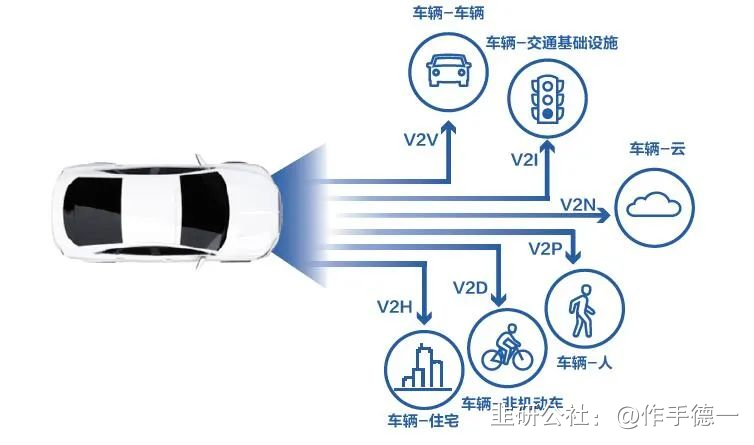
图 2.1 自动驾驶车辆与不同交通要素间的协同关系VICAD发展除自动驾驶技术外,还需要综合运用多种基础支撑技术,具体包括:
1)高可靠、低时延通信技术:包括无线通信和有线传输,其中无线通信又可分为直连无线通信(如LTE-V2X PC5、NR-V2X PC5等)和蜂窝移动通信(包括4G、5G,以及未来演进的6G)两类,有线传输则包括CAN、车载以太网、光纤网络等;2)2D/3D高精度融合感知技术:包括传感器离线/在线高精度标定技术、多传感器融合技术、交通事件感知认知技术、交通参与者行为预测技术、交通运行状况检测与预测技术等;3)高精度地图与高精度定位技术:包括高精度地图动态更新技术、路侧辅助定位技术等;4)车路协同决策与协同控制技术:包括自动驾驶意图预测、博弈仲裁、引导调度等协同决策规划,车辆、设施、人等多目标协同控制技术;5)高性能云计算技术:包括高性能边缘计算技术、多级云控平台技术、大数据和人工智能平台技术、算网一体智能调度技术;6)多级纵深安全技术:如自动驾驶功能安全与预期功能安全,信息安全技术(包括数据安全、网络安全技术、地理信息安全等),安全统一认证技术、安全态势感知技术、安全主动防御技术等。VICAD的本质是给每辆车开了一个“天眼”,这个“天眼”就是“上帝视角”,它不仅能帮助车辆在“完美”视角下保障安全,还能高效分配道路时空资源,让所有交通要素各行其道、各得其所。需要说明的是,VICAD实现的基础是通过集成先进的感知、计算、通信、决策控制等技术,构建一套能够连通信息空间与物理空间,基于数据的自由流动构建状态感知、实时交互、科学决策、精准执行的闭环赋能体系。VICAD中的“V”是Vehicle,包括不同网联等级和自动化程度的车辆,“I”则是Infrastructure,一般代指路端智能基础设施及环境,包括但不限于:1)道路工程及配套附属设施(路面、道路标志标识、信号灯、照明、供电等设施);2)智能感知设施(摄像头、毫米波雷达、激光雷达等);3)车路通信设施(直连无线通信设施、蜂窝移动通信设施);4)计算控制设施(路侧边缘计算节点、多接入边缘云或各级云服务平台);7)道路上承载的各类人员(如行人、施工人员、非机动车驾驶员等)。将支持VICAD应用所需的全部要素所组成新型复杂系统称为车路协同系统,它除了具有数据驱动、软件定义、泛在连接、虚实映射、异构集成等一系列通用特征外,还面向自动驾驶和智能交通应用,具有以下核心特征和优势:(1)交通全要素的一体化
如图2.2所示,车路协同系统中的交通参与者、交通运输工具、交通基础设施和交通环境不再只被看作一个简单的对象,人、车、路和环境所对应的交通要素通过传感器的采集和融合处理,成为具有自主身份且可具备信息交互功能的数字孪生体。物理实体和数字孪生体之间可以通过有效信息流和决策控制流完成信息传递和决策控制闭环,例如车辆的远程操控、道路信号灯的优化控制、道路可变标识控制等;不同物理实体之间,在车路协同这个复杂信息物理系统的全局调度下,呈现出更加高效、更加秩序化的交通运行态势。
图 2.2 基于VICAD的交通全要素一体化系统模型
(2)自动驾驶计算、感知、决策、控制的一体化
如图2.3所示,AD由车辆自身完成“感知-决策-规划-控制-执行”全过程,而在VICAD模式下,车辆、路端或云端都可能承担部分或全部“感知-决策-规划-控制-执行”功能,基于车路云一体化计算和互联,实现一体化感知、一体化决策规划和一体化控制,其中一体化计算和互联是关键基础,一体化感知与决策控制是核心应用。
在一体化计算方面,智能汽车的算力从2019年开始快速提升,目前TESLA Model3的算力达到144 TOPS,蔚来发布的ET7算力甚至会超过1000 TOPS,但仅仅依靠单车智能增加传感器提升感知能力、增加运算单元提升车端算力,这样会导致自动驾驶汽车成本无限增加。基于低时延、高可靠网络的传输互联,通过VICAD可以充分发挥路端和云端算力充裕、易部署调度等优势,对车端感知能力和算力进行有效分担,突破单车算力极限,实现全系统算力的合理分布分配和优化均衡。在一体化感知、决策规划和控制方面,一体化感知可以通过车车协同感知、车路协同感知和车云协同感知的综合作用,起到扩展自动驾驶车辆感知范围、提高车辆感知能力的作用。一体化决策规划和一体化控制一方面可以帮助车辆克服全局优化类场景和极端场景,进一步提升自动驾驶的安全性、扩展自动驾驶ODD,提高车辆的自动驾驶能力;另一方面还能通过对交通环境的控制,为车辆创造安全秩序化的驾驶环境,提高交通整体运行安全性和效率。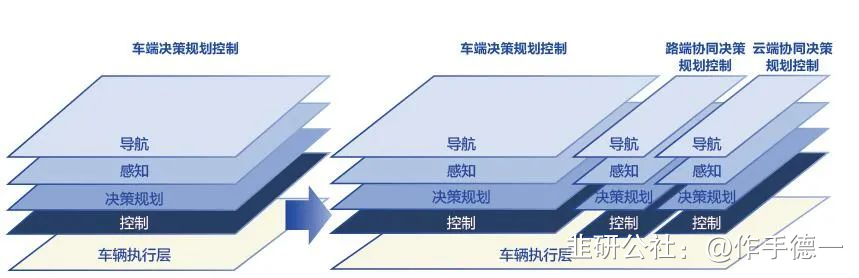
图 2.3 VICAD感知、决策、控制的一体化
(3)数据驱动的自动驾驶、智能交通跨行业应用一体化
车路协同系统的核心目标是利用一套车路云基础设施与基础能力体系,通过数据驱动同时赋能自动驾驶、智能交通,甚至共享出行、智慧城市等更多行业,支持不断迭代和创新发展。传统交通系统和车辆中大量的数据都是隐性存在的,没有被充分利用和挖掘出其背后潜在的价值。如图2.4所示,车路协同系统通过构建数据层面“状态感知、实时分析、科学决策、精准执行”自由流动的闭环赋能体系,能够将数据源源不断地从物理空间中的隐性形态转化为信息空间的显性形态,并不断迭代优化。数据是车路协同系统的基础和灵魂,贯穿了状态感知、实时分析、科学决策、精准执行的全流程,数据在自动生成、自动传输、自动分析、自动执行以及不断迭代优化过程中不断积累、螺旋上升,不断产生更为优化的数据,能够通过聚变引起质变。