





华为国内首发高精度4D毫米波雷达
House
超短追板的游资
2024-04-24 12:34:04
【华为将国内首发高精度4D毫米波雷达】《科创板日报》24日讯,华为智能汽车解决方案BU CEO靳玉志透露,将在国内首发高精度4D毫米波雷达,2024年底将启动泊车代驾先锋计划,覆盖100个商业停车场,2000个社区和办公停车场。同时,华为还发布乾崑云雀大模型,可实现全流程智能诊断。
激光雷达的平替
当前,传统的毫米波雷达在智能化程度较高的汽车上已经有广泛应用,但由于缺乏高度注意维度的数据,很难分辨无需刹车的地面低小障碍物、空中障碍物以及需要刹车的路面较大障碍物,易造成误判。汽车自动紧急制动系统为避免误刹车情况发生,逐渐增加视觉感知结果在决策中的权重,使毫米波雷达的感知结果在决策中处于次要地位。
但视觉感知依赖于对大量标注样本的训练,如果汽车遇到数据库中没出现过的样本,存在发生事故的风险。
4D毫米波雷达在传统毫米波雷达基础上,增加了俯仰角信息,能够形成点云图像,进而可以分辨无需刹车的地面低小障碍物、空中障碍物以及需要刹车的路面较大障碍物,能够避免窨井盖、路肩、减速带所产生的虚警现象,大大减小了误刹与漏刹的可能。
不仅如此,4D毫米波雷达探测距离可高达300米,高于一般激光雷达。在雨雪等恶劣天气下,激光雷达也常常“罢工”,而毫米波雷达则不受影响。毫米波雷达和激光雷达的主要差距在精度,4D毫米波雷达水平角分辨率达0.5度左右,接近低端的16线激光雷达,而主流激光雷达水平角分辨率可达到0.1度,两者有数倍的差距。 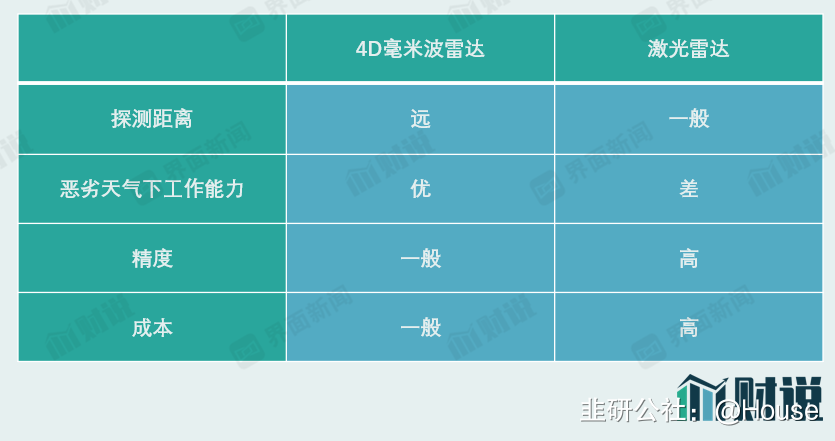
根据弗若斯特沙利文的数据,全球车载激光雷达的市场规模到2025年将达135.4亿美元。
从这个角度看,4D毫米波雷达潜在市场仅略小于激光雷达,一定程度上可以替代一些低端激光雷达,并且泛用性更好。
作者利益披露:原创,不作为证券推荐或投资建议,截至发文时,作者不持有相关标的。
声明:文章观点来自网友,仅为作者个人研究意见,不代表韭研公社观点及立场,站内所有文章均不构成投资建议,请投资者注意风险,独立审慎决策。
S
吴通控股
S
商络电子
S
万安科技
S
神宇股份
S
梅安森
工分

3.90
转发
收藏
投诉
复制链接
分享到微信

有用 3
打赏作者

无用
真知无价,用钱说话
0个人打赏
同时转发

评论(1)
只看楼主
热度排序
最新发布
最新互动

- 1