





一个混合可扩展的脑启发式机器人平台

掘金寻牛
全梭哈的老韭菜
2023-11-06 10:23:40
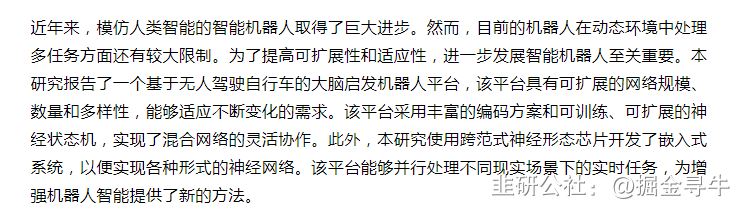
为了克服上述挑战,本研究提出了三种设计原则来开发机器人平台,灵感来自人脑(图1)。首先,受大脑皮层功能专业化和丰富的编码方案启发,开发了一种混合架构,可以实现灵活的网络间协作,并有效地整合不同的编码方案。其次,为了适应动态环境,开发了一个基于混合神经状态机(HNSM)的高级决策模块,灵活地集成不同的模块,提供监督和调度不同信息流的能力,以及在实施过程中处理不断增加的任务的扩展能力。第三,受皮层柱组织的新皮层区域启发,开发了一个基于跨范式神经形态芯片“Tianjic”的可扩展计算系统,以及用于硬件和软件协同设计的定制工具链。该系统有可能支持大脑启发系统的进化和生长,类似于人类大脑的进化和生长。
# 结论与启发展望
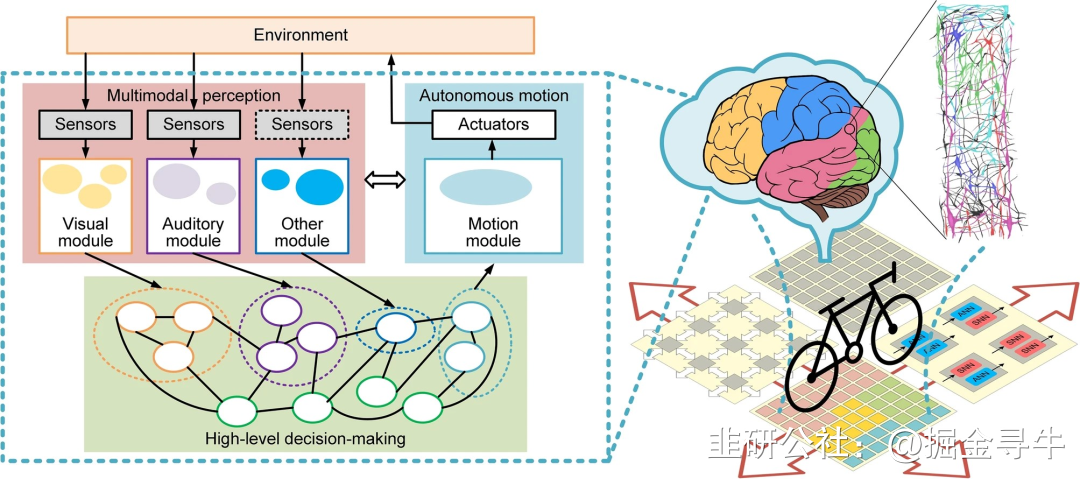
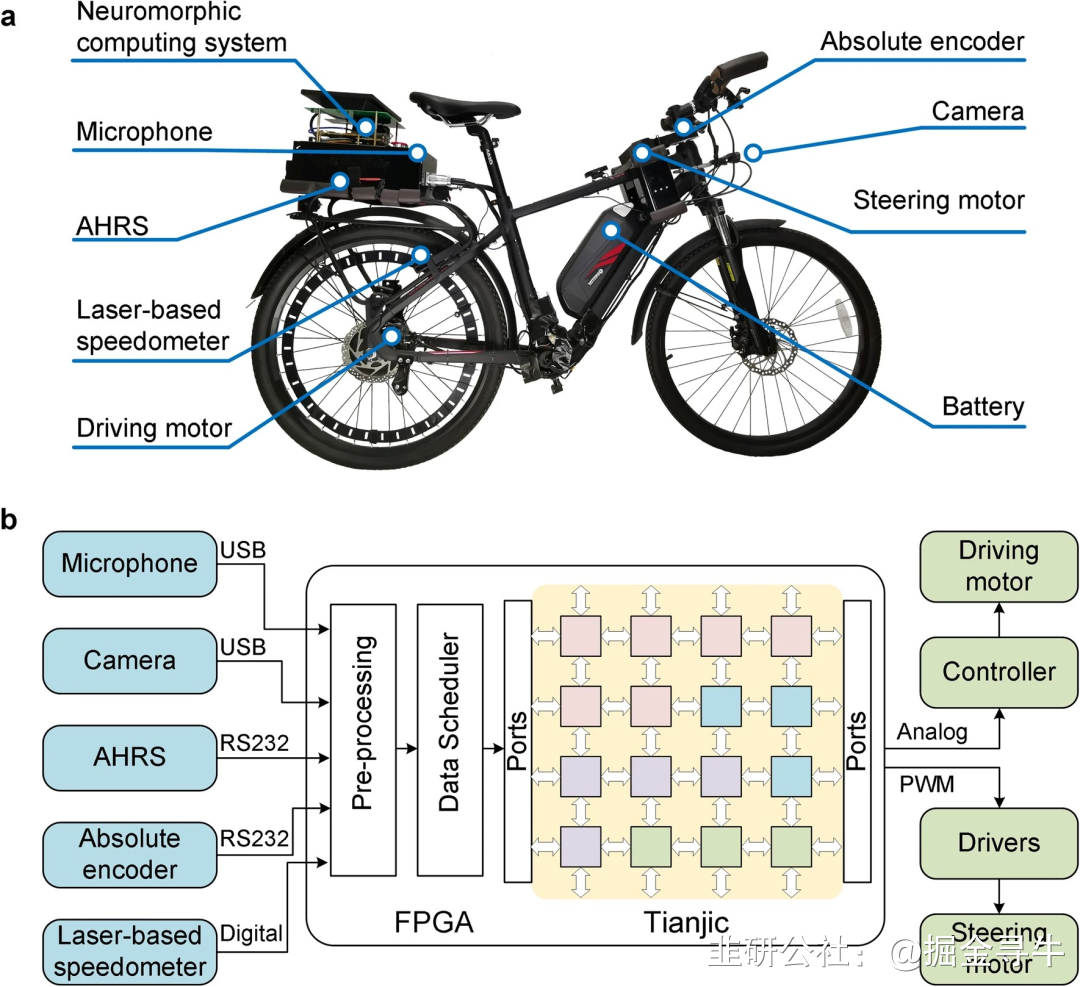
本研究报告了一种混合和可扩展的大脑启发机器人平台,能够同时完成多个复杂任务,包括多模态感知、高层决策和自主运动。该平台的设计受到了人类大脑的启发,采用了混合架构来集成不同编码方案,高级决策模块来实现网络协作,以及可扩展的计算系统来支持进化。在基于该平台的无人驾驶自行车的开发中,该自行车成功完成了目标跟踪、避障、语音命令识别、平衡控制和决策等任务。
混合架构将结合计算机科学和神经科学的进展,推动大脑启发机器人系统的发展; 出色的平台扩展性、算法和计算能力将允许灵活地集成更多的传感器和功能模块,以应对复杂的场景; 采用跨范式神经形态计算系统的机器人平台不仅能够支持大规模和多样化的网络,还能推动在线学习的发展。
总之,该系统可作为广泛机器人研究的通用平台,涵盖感知、认知、自动控制、语言理解、决策、学习和适应等方面的基础理论和应用。此外,混合和可扩展的平台可通过迭代开发和不断改进不断完善。通过研究对外界环境变化的适应,可以探索人工通用智能面临的一些关键挑战,从而推动通用人工智能的发展。
作者利益披露:转载,不作为证券推荐或投资建议,旨在提供更多信息,作者不保证其内容准确性。
声明:文章观点来自网友,仅为作者个人研究意见,不代表韭研公社观点及立场,站内所有文章均不构成投资建议,请投资者注意风险,独立审慎决策。
S
创新医疗
S
东方中科
S
冠昊生物
工分

1.93
转发
收藏
投诉
复制链接
分享到微信

有用 2
打赏作者

无用
真知无价,用钱说话
0个人打赏
同时转发

评论(1)
只看楼主
热度排序
最新发布
最新互动
- 利用液晶聚合物来制备“人工肌肉”的理念,最早由法国物理学家、诺奖得主皮埃尔-吉勒·德热纳(Pierre-Gilles de Gennes)提出。近年来,智能材料尤其是刺激响应性材料,一直是热门的研究领域。这些材料在受到外界刺激之后,会发生伸长、收缩、或弯曲等形变并能对外做功,和人类肌肉十分相似。北京大学陈尔强教授课题组深耕这一领域已有多年,近日他们通过制备单轴取向的聚合物样条,得到了可以自发随温度伸长和收缩的材料,形变量达 118%,十分接近于人体肌肉的 120% 收缩率。00打赏回复投诉

- 1